


Ryan - compatibility coding for SparkFun board, wiring, troubleshooting, painting, Paseo Setup
Manuel - interface laser cutting, interface construction, drilling, painting, description
Navjit - bot arm design and construction, arm laser cutting, arm box laser cutting, coding, painting, Paseo Exhibition morning setup
Matt - interface design, drilling, wiring, painting, Paseo Setup & Exhibition, website
Each member of our group were given a topic to produce a sketch for a design idea. Once we looked at all of our group members pitches we decided our topic for the Paseo Prototyping Festival would be Accessibility. When we discussed the final design for our box, our goal became to design something that was the complete opposite of accessible. We wanted something that was awkward to use. To make things difficult, we placed the potentiometers used to control the robot arm at random places on the box. Participants would have to search for the potentiometers by viewing the user interface from multiple positions. Our intent was to influence the user to be in an awkward position. To help with this, the interface box was designed to allow the positioning of the buttons and potentiometers on several different planes. This would require the user do more than just stand in front of the box. They would have to stoop and move around in different ways to see and access all of the buttons and potentiometers.
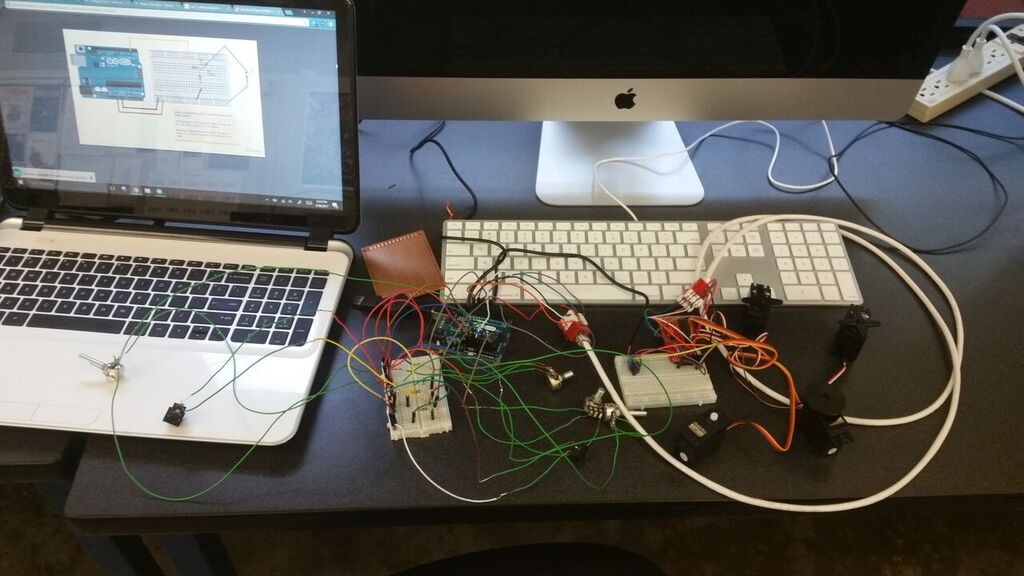
Both Ryan and I took care of the wiring. Ryan focused on the connections for the interface box interior. Both he and I focused on the connection between the interface and the robot arm with the use of a CAT 5 cable. Once the wiring was finished, Ryan dealt with the coding to make the servos compatible with the microcontroller.
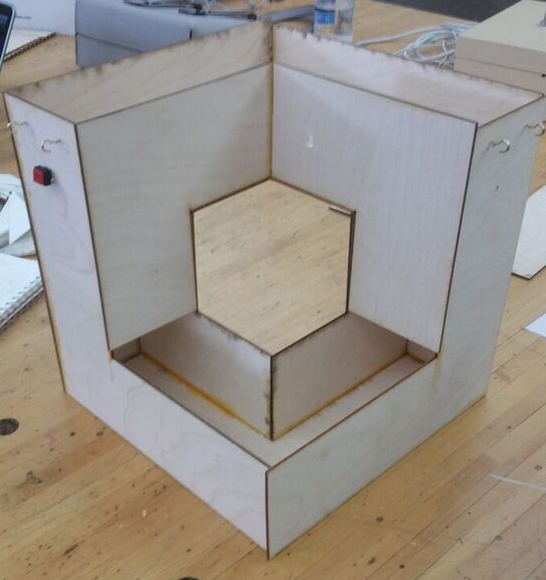
Once I came up with the design for the interface, Navjit created the vector file for the laser cutter. There were some small imperfections once the pieces for the interface were transferred over to the laser cutter. Manuel corrected the file, re-cut the pieces, and put the interface box together.
Navjit lasercut and put together the robot arm, along with the nessesary servos, and it's containing box. This is where Ryan and her got the two boxes to communicate to each other using the CAT 5 cable as a go between by implementing the SparkFun board.
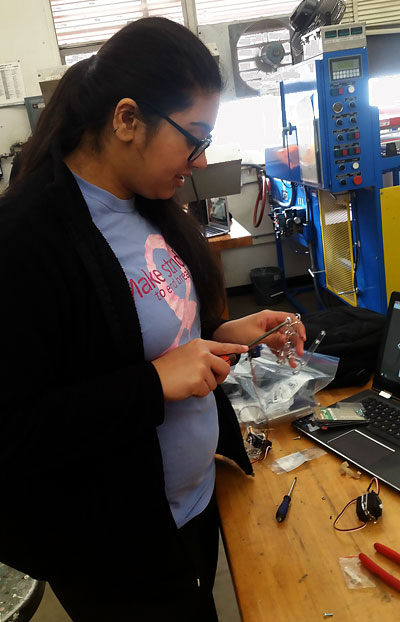
Here is Navjit putting together the robot arm she had laser cut.
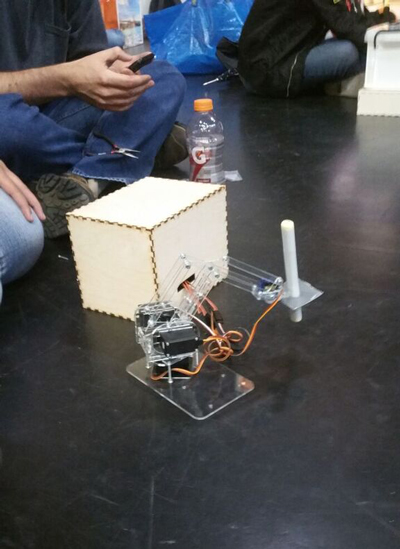
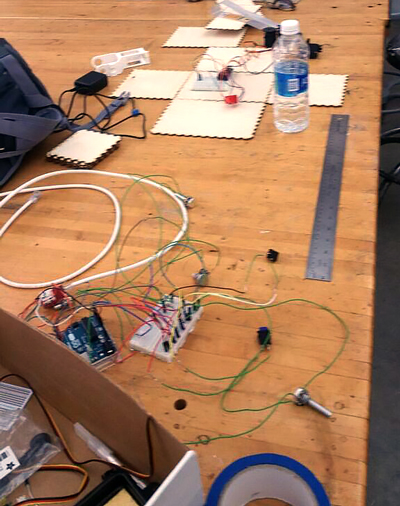
Here is the final bot, waiting to be installed in the Paseo showroom.
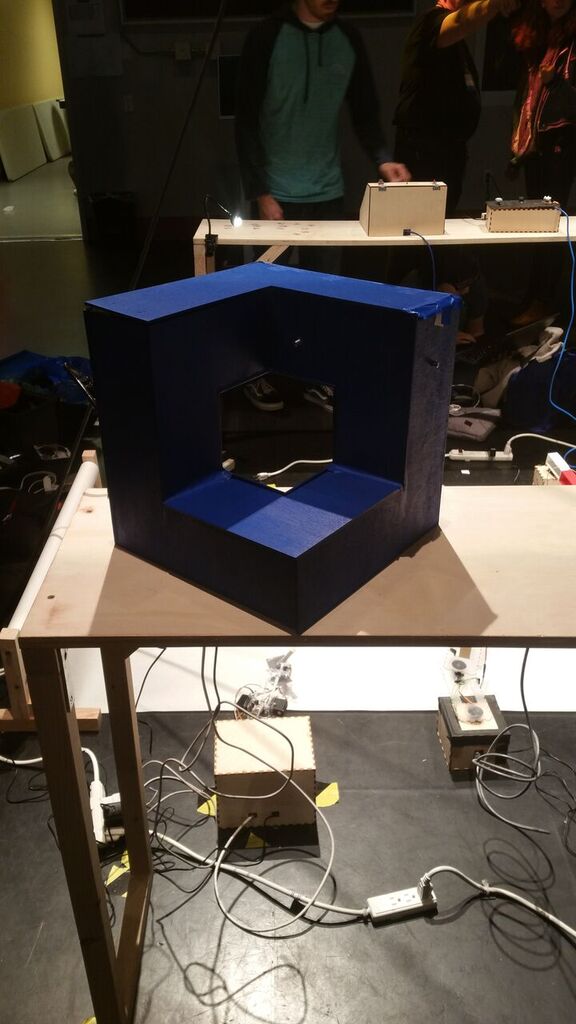
This is the user's point of view after completing the entire installation.